-
Menu
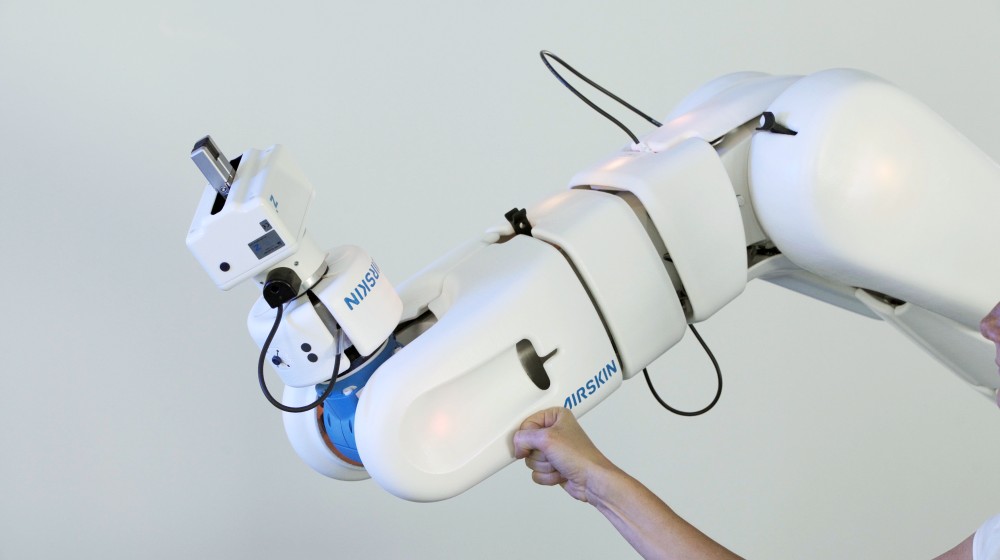
AIRSKIN® Sicherheit
Stellen Sie sicher, dass Ihre Mitarbeiter in der Nähe von Industrierobotern sicher sind
Höchste Sicherheitsbewertung
Zertifiziert nach EN / ISO 13849-1 (PL e / Kat. 3) und EN / IEC 62061 (SIL 3). In den letzten 3 Jahren hat AIRSKIN® zahlreichen Kunden dabei geholfen, eine zaunlose Arbeitsumgebung zu schaffen.
Kollisionssicherheit auch mit Industrierobotern
AIRSKIN® erkennt alle Kollisionen mit dem Roboter und den dazugehörigen Werkzeugen (Freiraum, Klemmen und Scheren) und stoppt den Roboter sofort. AIRSKIN® erfüllt die Standards ISO 10218 und ISO / TS 15066.
Klemm- und Schergefahren
Bei Klemm- und Schergefahren muss der Bremsweg des Roboters kürzer sein als die Dicke der weichen AIRSKIN®. Zulässige Geschwindigkeiten müssen durch Messen der bei der Kollision auftretenden Kontaktkräfte mit einem ISO / TS 15066-konformen Messgerät erreicht werden.
AIRSKIN® ermöglicht ISO / TS 15066-konforme kollaborative Anwendungen
Kollaborative Anwendungen
AIRSKIN® ermöglicht ISO / TS 15066-konforme kollaborative Anwendungen.
Zweikanalige OSSD-Sicherheitsvorrichtung
AIRSKIN® ist ein PLe / Kat. 3 Sicherheitsvorrichtung, die über 6-polige Kabel einfach an jede sichere E/A-Schnittstelle einer Robotersteuerung angeschlossen werden kann.
More about AIRSKIN technology
Druck
Um AIRSKIN® zu aktivieren, werden nur 5 N Kraft benötigt. Die weichen Pads dämpfen Kollisionen, absorbieren Kollisionsenergie und vermeiden hohe lokale Drücke (siehe Kraft- und Druckgrenzen in ISO / TS 15066).
More about AIRSKIN technology
Mit AIRSKIN® können Sie hohe Geschwindigkeiten in der Mensch-Roboter-Kollaboration erreichen
FAQ
-
Stellen Sie sicher, dass Ihr Roboter für ISO / TS 15066 bereit ist, was eine sichere Positions- und Geschwindigkeitsüberwachung bedeutet. Bei KUKA-Robotern wird die erforderliche Funktion als sicherer Betrieb bezeichnet.
-
Bis zu 15 AIRSKIN®-Pads können in Serie geschaltet werden. Bei größeren Robotern, zum Beispiel Cybertech, verwenden wir vier Kreise mit jeweils 12 Pads, die in "Greifer", "Achse 4-6" usw. gruppiert sind.
-
Zulässige Geschwindigkeiten werden nach ISO / TS 15066 unter Verwendung einer Formel erhalten, die die Robotermasse und das Nutzlastgewicht umfasst.
-
Wie bei jeder Roboteranwendung ist eine Risikoanalyse obligatorisch. Mit AIRSKIN® ist das Verfahren dasselbe wie mit einem leichten Cobot: Identifizieren Sie mögliche Kollisionsbereiche und messen Sie Kraft und Druck. Stellen Sie die Robotergeschwindigkeit an dieser Position ein, um den Schwellwert in ISO / TS 15066 zu erhalten.